We spoke with inventors Professor Tawfique Hasan and Dr Zhuo Chen, from the Cambridge Graphene Centre at the University of Cambridge, to learn more about the technology for miniature enhanced tactile sensor for robots that they recently presented in Nature Materials.
Their innovation was patented through Cambridge Enterprise in 2024, to ensure the technology could be commercialised via a University spinout.
The aim is to bring the tactile sensors, formed of liquid metal composites and graphene, closer to becoming deployed on robots in key areas such as care homes, prosthetics or assembly lines.
We started by asking them what was the problem they were trying to solve?
Prof Tawfique Hasan: “Essentially, how to detect different forces, such as slipping, on robotic grippers. Conventional technologies provide sensors that can be quite large and difficult to integrate onto robotic fingers. When we started our research, our target was to make something very small and directly integrated onto the fingers.
“As humans, when we grab something, even before touching it, we have some understanding about the weight and therefore we already have an estimated grip to apply. But then, if we’ve miscalculated and the object is actually heavier than what it looks like and starts to slip from our hand, we immediately tighten our grip.
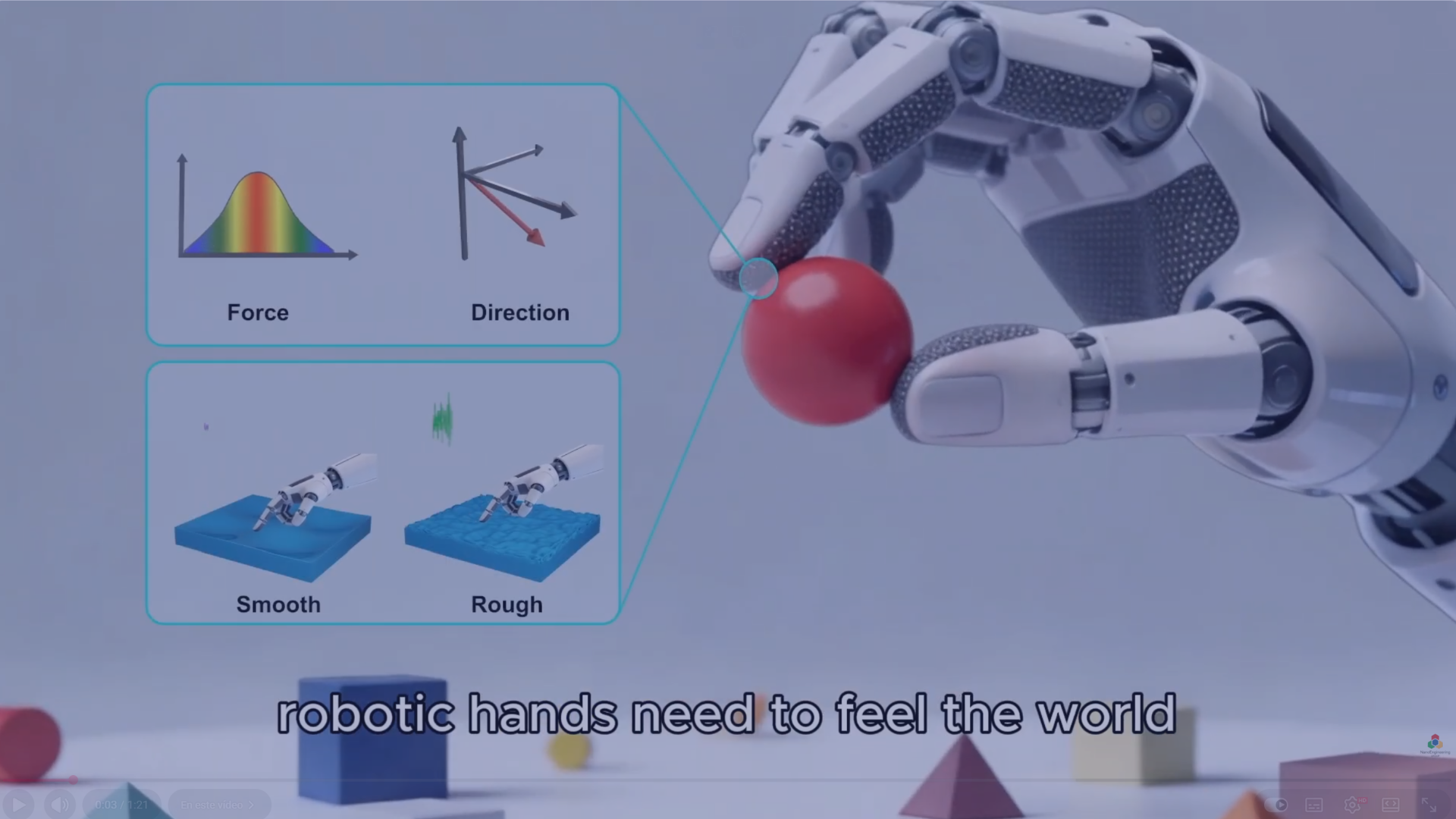
“This initial grip assessment comes from visual feedback but is then further informed by what we feel in our fingers. Our technology is our solution to giving robots the ability to hold on to an object with the right amount of force, or that may be slipping from their hand.”
Dr Zhuo Chen: “The same applies to robotic manipulators and robotic hands. Tactile information provides crucial feedback for robots performing dexterous tasks, such as handling fragile or delicate objects, or manipulating items with irregular shapes. It is also essential for safe human-robot interaction. Our goal is to equip robots with tactile intelligence and help fill the missing gap in their multi-modal sensing capabilities.
“Traditionally, robots have relied heavily on visual information, but vision alone cannot tell a robot how an object actually feels during contact, for example, whether it is slipping, deforming, or being gripped too tightly. That is where tactile sensing becomes critical.”
That was something that robots were not able to do before?
Prof Tawfique Hasan: “Not with fingertip sensors. There are larger sensors available that may be able to do this, but don’t have our accuracy level. Our composite system’s structure allows us to differentiate between two different forces – normal and shear force. Normal force relates to the magnitude of the gripping force applied by the finger to an object, while shear force is associated with friction and object slip.
Dr Zhuo Chen: “Excitingly, our sensor also generates more advanced tactile information such as toughness, roughness, and general texture of the material.
We know that touch is a very important source of information for robots when interacting with the world. However, they currently mainly rely on visual feedback due to a lack of sensors like ours.
We have seen advancements in robotic vision in recent years, but not so much in touch, why may that be?
Prof Tawfique Hasan: “Hardware advancements in robotics have generally lagged behind software advancements.
“When it comes to visual sensing, researchers have leveraged the use of cameras for many years, as these have developed due to the digital photography industry and beyond. However, the tactile sensing area did not have any ready to plug in technology available that could be easily integrated into a robotic system and thus be improved over time.”
Your prototype is based on liquid metal composites and graphene – why these materials?
Dr Zhuo Chen: “Our polymer has multiple components in it: liquid metal, graphene and, very critically, aligned nickel particles. These different components mean that we can differentially increase the sensitivity of our sensor to different forces. With increased sensitivity, we gain smaller limits of detection, detecting and differentiating smaller forces. These materials work with each other synergistically so that they can provide a conduction network that can undergo dramatic resistance change in response to pressure.”
Prof Tawfique Hasan: “The heterogeneous material system is there to cover a wide range of pressure. We have, as Zhuo mentioned, the nickel metal nanoparticles. These nanoparticles are conventionally used for pressure-sensitive materials and could be described as spiky.
“In our system, we have many of them aligned. When there is pressure applied from either side, these spiky nanoparticles come closer to each other. In between them is the polymer, a material that does not conduct electricity. So, if you push our sensor, there’ll be a significant change in the electrical resistance, even though the nickel metal nanoparticles are not physically connected. That’s how the lower region of the sensor works.
“In the higher region, we have graphene nanoplates and liquid metal droplets. These actually remind me of the T-1000 in ‘Terminator 2: Judgment Day’, a liquid-metal shapeshifting robot that could flow through narrow gaps and reform itself. Of course, that liquid metal and what we are doing is vastly different, but it always reminds me of that particular film. I digress! In our case the deformable liquid metal is part of the sensing composite.
The composite itself has a lot of pores. It’s like a sponge. Within that sponge there are chains of metal nanoparticles that are very sensitive to pressure. There are also ultrathin graphene flakes which bridge these chains.”
This complex chain and the nickel nanoparticles work effectively together to be able to react not only to small pressures but also to larger pressures, giving us a high dynamic range.”
From left to right in one of the Cambridge Graphene Centre labs: Dr. Doğa Doğanay, Mr. Amir Nateghi, Mr. Madhurjot Sohi, Dr. Zhuo Chen.
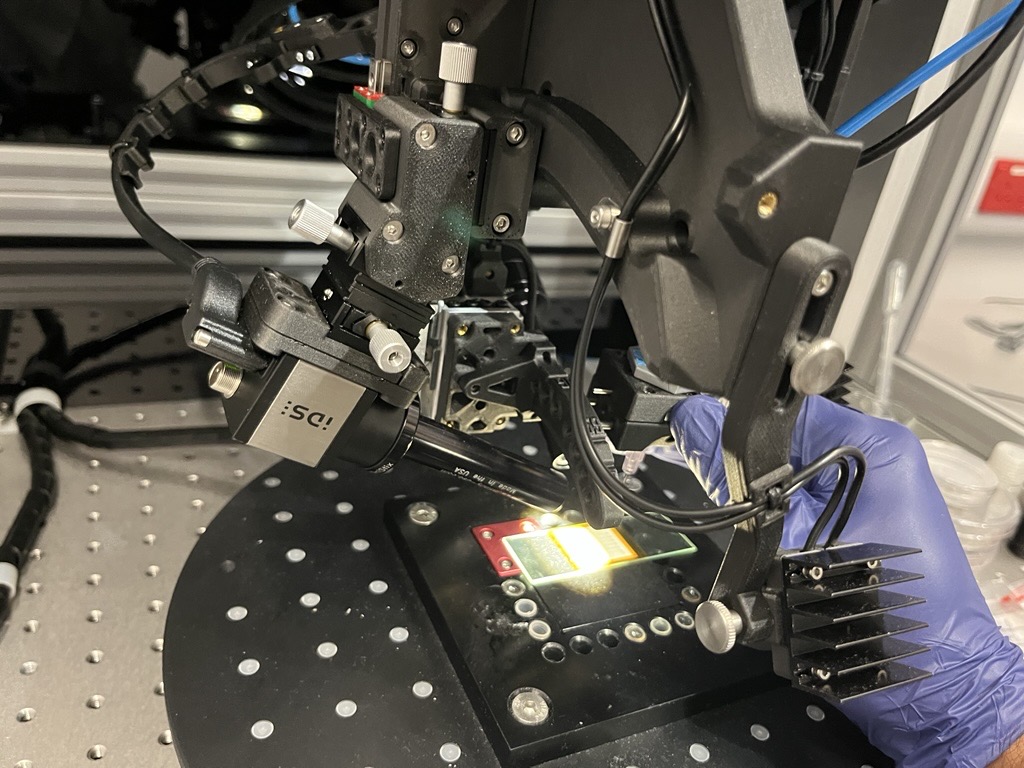
Delta Printing System capable of printing ultra-fine conductive traces with micrometre-scale feature widths.
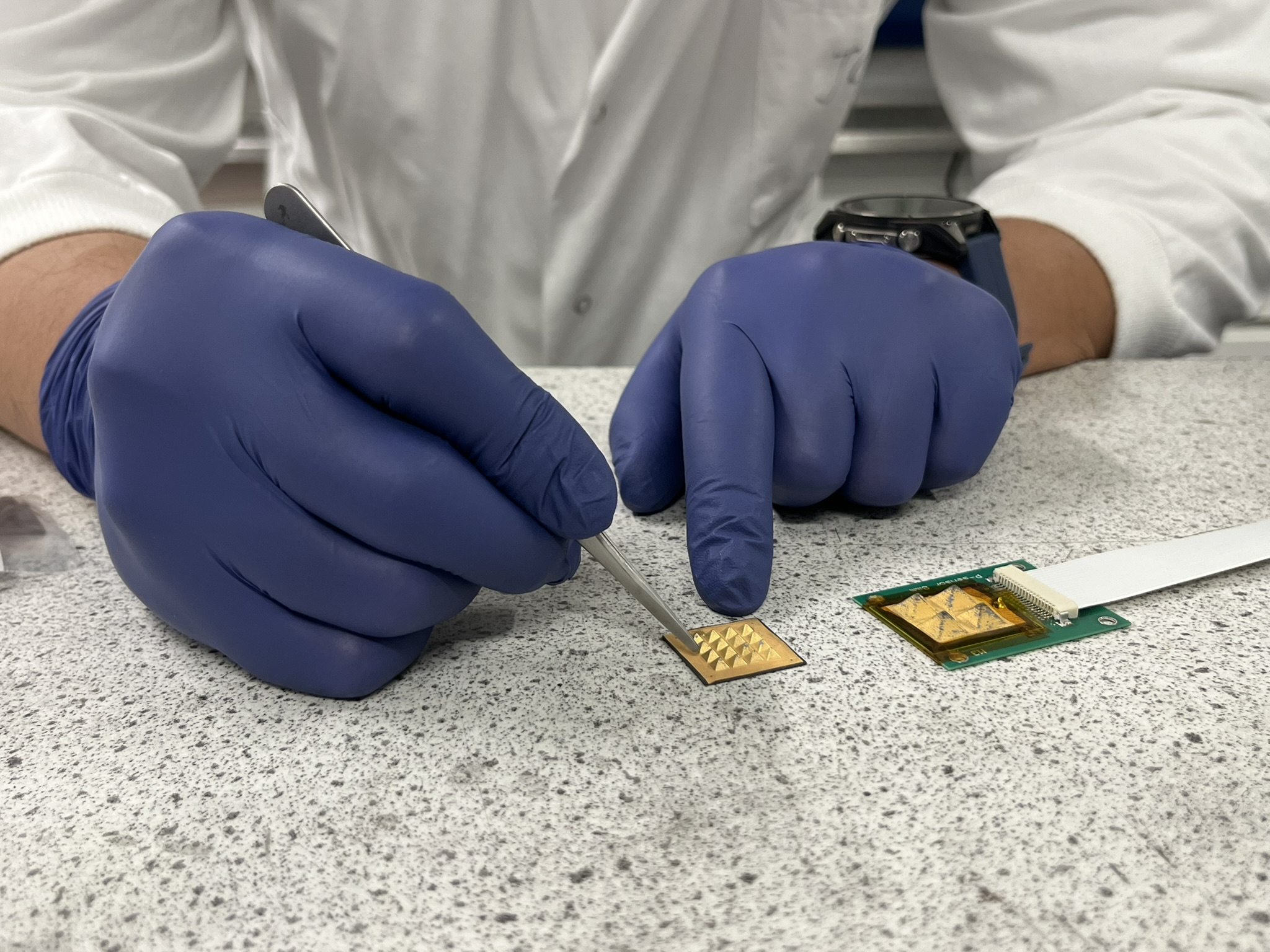
The pyramidal structure of the robotic sensors.
The material has been shaped into tiny pyramids, why is that?
Dr Zhuo Chen: “The pyramid structures allow us to decompose the different acting forces; it enables the sensor to detect really small forces while maintaining the wide measurement range Tawfique just mentioned. We’re also building the sensor in the form of a dome. If you look at the epidermis structure of human skin, it’s a curvy structure, and that’s what we’re now trying to replicate.”
So that we can gauge size, what can we compare the sensors you’re producing to?
Dr Zhuo Chen: “The benchmark we’re comparing it with is human skin. If we take a fingertip, the resolution is about two millimetres. If I close my eyes and use a pin to prod my fingertip in one place, and then in another around two millimetres away, I’ll feel it roughly in the same place. That’s what we mean by resolution being about two millimetres.”
Our sensor’s resolution is ten times higher – we can detect 0.2 millimetres in spatial resolution. That’s 200 microns. In comparison, the diameter of human hair is about 50 microns on average. We could say that our sensor is sensitive enough to detect a grain of sand.”
What uses does your technology potentially have?
Prof Tawfique Hasan: “There are several – In minimally invasive surgery, prosthetics, elderly care, assembly lines, or even agriculture to name a few. In assembly lines, robotic hands need to be able to manipulate any object sensibly. Fruits such as strawberries, or even pears or plums. They come in all different shapes, sizes, and weights. Dealing with anything organic in an unstructured environment means that any fruit picking robot you may want to deploy will need intelligence, not only through the eyes, but also through its grippers.”
What is next?
Prof Tawfique Hasan: “We are very optimistic about the deployment of the technology in existing industries, our aim being that our solution could plug and play within existing robotic fingers in a wide range of settings. We do hope we’ll be able to commercialise this technology and bridge an important gap in robotics, allowing them to be used in a wider range of disciplines, but more crucially, in a more effective and safer way.”
The technology is currently being developed by Professor Tawfique Hasan, Dr Zhuo Chen, Dr Guolin Yun, Dr Doga Doganay, Mr Madhurjot Sohi and Mr Amir Nateghi.